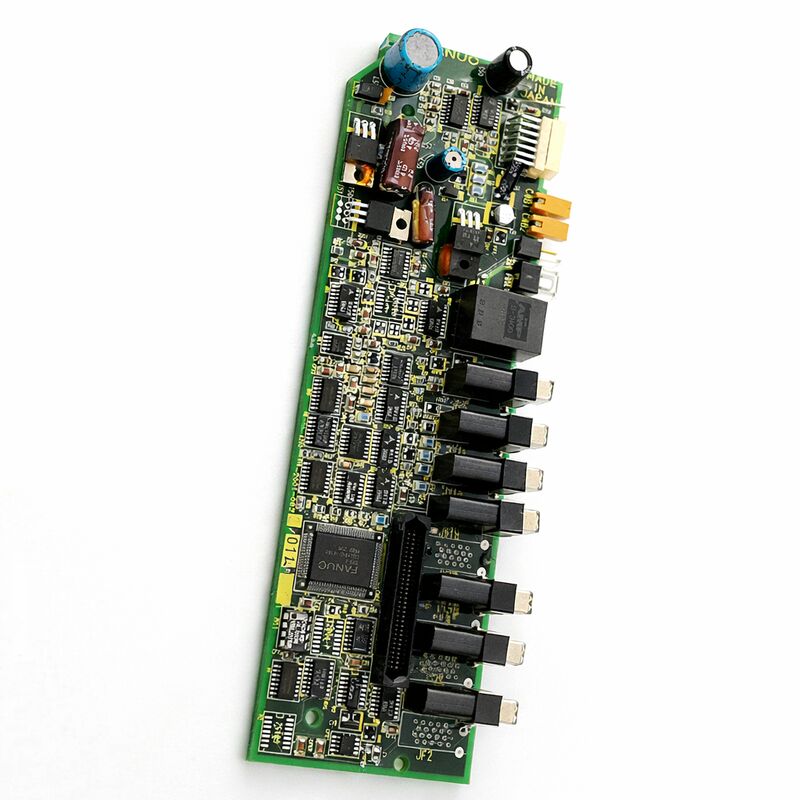
FANUC A20B-2001-0821 | আলফা সিরিজ এসভিএম সার্ভো কন্ট্রোল বোর্ড — সিএনসি এবং রোবট, জাপান অরিজিন
পার্ট নম্বর: A20B-2001-0821
প্রস্তুতকারক: FANUC Corporation (Japan)
পণ্যের প্রকার: সার্ভো এমপ্লিফায়ার কন্ট্রোল বোর্ড (SVM PCB)
বোর্ড সিরিজ: A20B-2001
ড্রাইভ ফ্যামিলি: FANUC Alpha Series Servo Amplifier Module (SVM)
অ্যাপ্লিকেশন: FANUC CNC এবং রোবট সার্ভো ড্রাইভ সিস্টেম
ওভারভিউ
A20B-2001-0821 হল FANUC-এর আলফা সিরিজ সার্ভো এমপ্লিফায়ার মডিউল (SVM)-এর জন্য একটি সার্ভো এমপ্লিফায়ার কন্ট্রোল বোর্ড।
FANUC-এর মডুলার আলফা ড্রাইভ আর্কিটেকচারে, SVM হল এমপ্লিফায়ার ইউনিট যা সরাসরি একটি সার্ভো মোটরকে পাওয়ার দেয় — PSM দ্বারা সরবরাহকৃত ডিসি বাস ভোল্টেজ গ্রহণ করে এবং এটিকে তিন-ফেজ পরিবর্তনশীল-ফ্রিকোয়েন্সি এসি-তে রূপান্তর করে যা মোটর চালায়।
A20B-2001-0821 হল SVM-এর ভিতরের কন্ট্রোল বোর্ড: PCB যা সার্ভো ড্রাইভের কারেন্ট লুপ, ভেলোসিটি লুপ, এনকোডার ফিডব্যাক ইন্টারফেস এবং সিএনসি যোগাযোগের জন্য প্রসেসিং ইলেকট্রনিক্স ধারণ করে।
আলফা সিরিজ ড্রাইভগুলি FANUC-নিয়ন্ত্রিত মেশিন টুলস এবং ইন্ডাস্ট্রিয়াল রোবটের বিস্তৃত পরিসরে স্থাপন করা হয়েছিল।
একটি সিএনসি মেশিনিং সেন্টারে, প্রতিটি অক্ষ মোটরের নিজস্ব এসভিএম থাকে। একটি ছয়-অক্ষের ইন্ডাস্ট্রিয়াল রোবটে, প্রতিটি জয়েন্ট মোটরের নিজস্ব এসভিএম থাকে বা প্রতিবেশীর সাথে একটি এসভিএম ইউনিট শেয়ার করে।
এই এসভিএমগুলির প্রত্যেকটিতে একটি কন্ট্রোল বোর্ড থাকে। যখন একটি সার্ভো ড্রাইভ কন্ট্রোল বোর্ড ব্যর্থ হয়, তখন সেই অক্ষ বা জয়েন্ট বন্ধ হয়ে যায় — এবং সঠিক প্রতিস্থাপন বোর্ডের সাথে, এটি পুনরায় চালু হয়।
A20B-2001 সিরিজ বিভিন্ন ড্রাইভ কারেন্ট রেটিং এবং ইন্টারফেস প্রকারগুলি কভার করে একাধিক আলফা এসভিএম কনফিগারেশনের জন্য কন্ট্রোল বোর্ডগুলি জুড়ে বিস্তৃত।
-0821 ভ্যারিয়েন্ট এই পরিবারের মধ্যে তার নির্দিষ্ট এসভিএম মডেল এবং হার্ডওয়্যার রিভিশন পরিবেশন করে।
বোর্ডটি জাপানে তৈরি এবং ইন্ডাস্ট্রিয়াল সার্ভো ড্রাইভ অ্যাপ্লিকেশনগুলির অবিচ্ছিন্ন-ডিউটি প্রয়োজনীয়তার জন্য ডিজাইন করা হয়েছে।
মূল স্পেসিফিকেশন
| প্যারামিটার |
মান |
| পার্ট নম্বর |
A20B-2001-0821 |
| প্রস্তুতকারক |
FANUC Corporation |
| পণ্যের প্রকার |
সার্ভো এমপ্লিফায়ার কন্ট্রোল বোর্ড |
| বোর্ড সিরিজ |
A20B-2001 |
| ড্রাইভ ফ্যামিলি |
FANUC Alpha Series SVM |
| অ্যাপ্লিকেশন |
FANUC CNC এবং রোবট সার্ভো ড্রাইভ কন্ট্রোল |
| অরিজিন |
জাপান |
| অপারেটিং তাপমাত্রা |
0 – 55°C (SVM ইউনিটে ইনস্টল করা হিসাবে) |
| স্টোরেজ তাপমাত্রা |
−20 – 55°C |
| আর্দ্রতা |
75% RH সর্বোচ্চ (নন-কন্ডেন্সিং) |
| উপলভ্য অবস্থা |
নতুন (সারপ্লাস) / সংস্কার করা / মেরামত করা |
এসভিএম কন্ট্রোল বোর্ড — তিনটি লুপ একটিতে
সার্ভো ড্রাইভ কন্ট্রোল বোর্ড একই সাথে সার্ভো ফিডব্যাক নিয়ন্ত্রণের সমস্ত তিনটি স্তর কার্যকর করে। এই লুপগুলি কীভাবে একসাথে কাজ করে তা বোঝা উভয়ই ব্যাখ্যা করে যে একটি সু-কার্যকরী সার্ভো ড্রাইভ কেন নির্ভুলভাবে কাজ করে এবং কন্ট্রোল বোর্ড যখন ক্ষয়প্রাপ্ত হয় তখন কী ব্যর্থ হয়।
কারেন্ট লুপ হল ভিত্তি।
এটি এসভিএম-এর কারেন্ট সেন্সর থেকে মোটরের ফেজ কারেন্ট পড়ে, সেগুলিকে ভেলোসিটি কন্ট্রোলার থেকে কারেন্ট কমান্ডের সাথে তুলনা করে এবং প্রকৃত কারেন্টকে কমান্ডেড স্তরে আনার জন্য IGBT গেট সিগন্যালগুলি সামঞ্জস্য করে। এই লুপটি প্রতি সেকেন্ডে কয়েক হাজার হারে চলে।
বোর্ডে একটি ক্ষয়প্রাপ্ত কারেন্ট পরিমাপ সার্কিট এই লুপে ত্রুটি তৈরি করে, কারেন্ট বিকৃতি তৈরি করে যা মোটরের শব্দ, কম্পন এবং তাপ হিসাবে দেখা দেয়।
ভেলোসিটি লুপ কারেন্ট লুপের উপরে বসে।
এটি এনকোডার ফিডব্যাক পড়ে, প্রকৃত মোটরের গতি গণনা করে, সেটিকে পজিশন কন্ট্রোলার থেকে কমান্ডেড গতির সাথে তুলনা করে এবং কারেন্ট কমান্ড তৈরি করে।
এই লুপটি প্রতি কয়েকশ মাইক্রোসেকেন্ডে আপডেট হয়।
একটি ক্ষয়প্রাপ্ত এনকোডার ইন্টারফেস সার্কিট ভেলোসিটি ফিডব্যাকে শব্দ তৈরি করে, গতির অস্থিরতা সৃষ্টি করে।
পজিশন লুপ শীর্ষে বসে। এটি সিএনসি-র ইন্টারপোলেটর থেকে পজিশন টার্গেট গ্রহণ করে এবং সেগুলিকে প্রকৃত এনকোডার পজিশনের সাথে তুলনা করে।
পজিশন ত্রুটি ভেলোসিটি কমান্ড চালায়। এই লুপ ক্লোজার প্রতিটি সার্ভো সাইকেলে ঘটে — সাধারণত ১ মিলিসেকেন্ড।
মেশিনের অক্ষ পজিশনিংয়ের নির্ভুলতা শেষ পর্যন্ত এই কন্ট্রোল বোর্ডে সমস্ত তিনটি লুপ একসাথে কতটা ভালভাবে কার্যকর হয় তার উপর নির্ভর করে।
সিএনসি এবং রোবট অ্যাপ্লিকেশনগুলিতে আলফা এসভিএম
একটি সিএনসি মেশিন টুলে, আলফা এসভিএম মডিউলগুলি ড্রাইভ ক্যাবিনেটে পিএসএম-এর পাশাপাশি মাউন্ট করা হয়। প্রতিটি এসভিএম একটি অক্ষ চালায়। একটি ৩-অক্ষের মেশিনিং সেন্টারে, সাধারণত তিনটি এসভিএম থাকে — একটি এক্স-এর জন্য, একটি ওয়াই-এর জন্য, একটি জেড-এর জন্য — সাথে একটি স্পিন্ডল এমপ্লিফায়ার মডিউল।
এই এসভিএমগুলির কন্ট্রোল বোর্ডগুলি FANUC-এর সিরিয়াল সার্ভো বাসের মাধ্যমে সিএনসি-র সাথে যোগাযোগ করে, পজিশন কমান্ড গ্রহণ করে এবং এনকোডার পজিশন রিপোর্ট করে।
একটি FANUC ইন্ডাস্ট্রিয়াল রোবট কন্ট্রোলারে, একই এসভিএম আর্কিটেকচার রোবটের জয়েন্ট মোটর চালায়।
উদাহরণস্বরূপ, আর-জে৩ কন্ট্রোলার জেনারেশন রোবটের ছয়টি জয়েন্ট অক্ষের জন্য আলফা এসভিএম ব্যবহার করত।
রোবট কন্ট্রোলার সিএনসি-র মতো একই সিরিয়াল ইন্টারফেসের মাধ্যমে এই এসভিএমগুলির সাথে যোগাযোগ করে।
A20B-2001-0821 কন্ট্রোল বোর্ড উভয় অ্যাপ্লিকেশন প্রেক্ষাপটেই কাজ করে কারণ হার্ডওয়্যার আর্কিটেকচার সামঞ্জস্যপূর্ণ।
এই ক্রস-অ্যাপ্লিকেশন সামঞ্জস্যতা রক্ষণাবেক্ষণে একটি ব্যবহারিক সুবিধা।
একটি অবসরপ্রাপ্ত রোবট থেকে একটি কন্ট্রোল বোর্ড একটি সিএনসি মেশিনে প্রতিস্থাপন হিসাবে কাজ করতে পারে, এবং তদ্বিপরীত, যদি বোর্ডের সম্পূর্ণ পার্ট নম্বরটি হুবহু মেলে।
একটি কন্ট্রোল বোর্ড ত্রুটি সনাক্তকরণ
একটি সার্ভো ড্রাইভ কন্ট্রোল বোর্ড ত্রুটি নির্দিষ্ট উপসর্গের একটি প্যাটার্ন তৈরি করে যা এটিকে অন্যান্য ড্রাইভ সিস্টেম ত্রুটি থেকে আলাদা করে।
পজিশন ত্রুটি, ভেলোসিটি অস্থিরতা, বা অস্বাভাবিক মোটরের শব্দ যা শুধুমাত্র একটি নির্দিষ্ট অক্ষে দেখা দেয় — যখন অন্য সমস্ত অক্ষ সঠিকভাবে কাজ করে — তখন সেই অক্ষের এসভিএম কন্ট্রোল বোর্ড বা তার এনকোডার ফিডব্যাক পাথ নির্দেশ করে। কন্ট্রোল বোর্ডের সমস্যাগুলি সাধারণত অক্ষ-নির্দিষ্ট এবং সামঞ্জস্যপূর্ণ হয়।
পাওয়ার-অন করার সময় একটি ড্রাইভ তার রেডি অবস্থায় প্রবেশ করতে অস্বীকার করে, কোনো গতি কমান্ড করার আগেই একটি ভিআরডিওয়াই (ভেলোসিটি রেডি) অ্যালার্ম দেখায়, এটি একটি কন্ট্রোল বোর্ড ত্রুটির একটি শক্তিশালী সূচক।
বোর্ডটি পাওয়ার-অন করার সময় স্ব-ডায়াগনস্টিকস চালায়। এই সিকোয়েন্সে একটি ব্যর্থতা একটি তাৎক্ষণিক এবং অবিচলিত অ্যালার্ম তৈরি করে।
বিরতিহীন পজিশন ত্রুটি যা তাপমাত্রার সাথে খারাপ হয় — ড্রাইভ ঠান্ডা হলে অক্ষ সঠিকভাবে কাজ করে এবং গরম হওয়ার সাথে সাথে খারাপ হয় — কন্ট্রোল বোর্ডের একটি তাপ-সংবেদনশীল উপাদান তার পরিষেবা জীবনের শেষ প্রান্তে পৌঁছেছে বলে ইঙ্গিত দেয়।
প্রায়শই জিজ্ঞাসিত প্রশ্নাবলী
প্রশ্ন ১: একটি সিএনসি অক্ষ পাওয়ার-অন করার সময় একটি অবিচলিত ভিআরডিওয়াই অ্যালার্ম তৈরি করে। ডিসি বাস ভোল্টেজ সঠিক। অন্য অক্ষগুলি স্বাভাবিক। এটি কি A20B-2001-0821?
পাওয়ার-অন করার সময় একটি একক-অক্ষ ভিআরডিওয়াই অ্যালার্ম, সঠিক ডিসি বাস এবং স্বাভাবিক অন্যান্য অক্ষ সহ, একটি কন্ট্রোল বোর্ড ত্রুটির সাথে সামঞ্জস্যপূর্ণ।
বোর্ডের পাওয়ার-অন স্ব-পরীক্ষা ব্যর্থ হয়েছে। কোনো অ্যালার্ম কোডের জন্য এসভিএম-এর এলইডি ইন্ডিকেটরগুলি পরীক্ষা করুন।
এনকোডার কেবল এবং ফিডব্যাক সংযোগকারী সঠিকভাবে বসেছে কিনা তা নিশ্চিত করুন — একটি আলগা ফিডব্যাক সংযোগকারীও এই উপসর্গ তৈরি করতে পারে।
যদি কেবলটি ভাল বলে নিশ্চিত করা হয়, তবে কন্ট্রোল বোর্ড প্রতিস্থাপন করুন।
প্রশ্ন ২: অক্ষটি কম গতিতে সঠিকভাবে চলে কিন্তু উচ্চ ফিড হারে ক্রমবর্ধমান পজিশন ত্রুটি দেখায়। যান্ত্রিক ব্যবস্থা স্বাভাবিক বলে মনে হচ্ছে। এটি কি কন্ট্রোল বোর্ড হতে পারে?
একটি স্বাভাবিক যান্ত্রিক ব্যবস্থার সাথে উচ্চ ফিড হারে ক্রমবর্ধমান পজিশন ত্রুটি সার্ভো কন্ট্রোল লুপগুলির দিকে নির্দেশ করে।
ভেলোসিটি বা কারেন্ট লুপ হয়তো যথেষ্ট দ্রুত সাড়া দিচ্ছে না — একটি লক্ষণ যে কন্ট্রোল বোর্ডের প্রসেসিং সার্কিটগুলি ক্ষয়প্রাপ্ত হয়েছে।
সার্ভো প্যারামিটারগুলি (লুপ গেইন, ফিডফরোয়ার্ড) সঠিক কিনা তা নিশ্চিত করতে সেগুলিও পরীক্ষা করুন।
যদি প্যারামিটারগুলি সঠিক হয় এবং সমস্যাটি চলতে থাকে, তবে কন্ট্রোল বোর্ডের ডিএসপি বা ইন্টারফেস সার্কিটগুলি সম্ভবত পুরানো হয়ে গেছে।
প্রশ্ন ৩: অক্ষ মোটর স্ট্যান্ডবাইলে অস্বাভাবিক কম্পন এবং শব্দ তৈরি করে, কিন্তু গতির সময় পজিশন নির্ভুলতা গ্রহণযোগ্য। কন্ট্রোল বোর্ডের কী কারণে এটি হতে পারে?
স্ট্যান্ডবাইলে কম্পন এবং শব্দ, গতির সময় গ্রহণযোগ্য নির্ভুলতা সহ, সাধারণত কারেন্ট লুপে একটি সমস্যা নির্দেশ করে — বিশেষ করে কন্ট্রোল বোর্ডের কারেন্ট পরিমাপ বা গেট ড্রাইভ বিভাগ।
স্ট্যান্ডবাইলে কারেন্ট ফিডব্যাকে একটি ছোট ত্রুটি বা শব্দ ডাইথারিং কারেন্ট তৈরি করে যা কম্পন হিসাবে প্রকাশ পায়।
এই ধরণের ত্রুটি প্রায়শই তাপমাত্রার সাথে খারাপ হয় কারণ উপাদানগুলি পুরানো হয়। কন্ট্রোল বোর্ড প্রতিস্থাপন করুন এবং স্ট্যান্ডবাই আচরণ তুলনা করুন।
প্রশ্ন ৪: একটি রোবট অ্যাপ্লিকেশন থেকে একটি প্রতিস্থাপন A20B-2001-0821 বোর্ড কি একটি সিএনসি মেশিন টুলে ব্যবহার করা যেতে পারে?
যদি পার্ট নম্বরগুলি হুবহু মেলে, তবে হার্ডওয়্যার সামঞ্জস্যপূর্ণ।
সার্ভো কন্ট্রোল বোর্ড সিএনসি এবং রোবট উভয় অ্যাপ্লিকেশনগুলিতে একই কাজ করে — পার্থক্যটি কন্ট্রোলার সফ্টওয়্যার এবং যান্ত্রিক ব্যবস্থায়, ড্রাইভ বোর্ডে নয়।
সম্পূর্ণ পার্ট নম্বরটি নিশ্চিত করুন, যার মধ্যে -0821 প্রত্যয় অন্তর্ভুক্ত রয়েছে। কখনও অন্য প্রত্যয়কে বিকল্প হিসাবে ব্যবহার করবেন না, এমনকি যদি বোর্ডটি শারীরিকভাবে একই রকম দেখায়।
প্রশ্ন ৫: কন্ট্রোল বোর্ড প্রতিস্থাপনের পরে, অক্ষটি প্রতিটি মুভে তার লক্ষ্য পজিশন অতিক্রম করে। প্যারামিটারগুলি ব্যাকআপ থেকে পুনরুদ্ধার করা হয়েছিল। সম্ভাব্য কারণ কী?
পুনরুদ্ধার করা প্যারামিটার সহ বোর্ড প্রতিস্থাপনের পরে পজিশন ওভারশুট সাধারণত একটি সার্ভো লুপ প্যারামিটার নির্দেশ করে যা সঠিকভাবে পুনরুদ্ধার করা হয়নি।
পজিশন গেইন, ভেলোসিটি গেইন, বা ফিডফরোয়ার্ড কম্পেনসেশন মান ভুল হতে পারে।
প্রভাবিত অক্ষের প্রতিটি সার্ভো প্যারামিটার মেশিনের ডকুমেন্টেশন এবং ব্যাকআপ মানের সাথে তুলনা করুন।
এনকোডার টাইপ সেটিং সঠিক কিনা তাও নিশ্চিত করুন — একটি ভুল এনকোডার টাইপ সেটিং ব্যবহার করলে ভুল ফিডব্যাক স্কেলিং হয় যা ওভারশুট বা দোলন হিসাবে প্রকাশ পায়।

 আপনার বার্তাটি 20-3,000 টির মধ্যে হতে হবে!
আপনার বার্তাটি 20-3,000 টির মধ্যে হতে হবে!